Building a CNN Classifier with PyTorch: Part 1#
In this tutorial, we will walk through the basic components of building a CNN classifier with PyTorch. We will use a Design Safe dataset from Hurricane Harvey, a category 4 hurricane that hit Texas in August of 2017 and resulted in catastrophic flooding to the Houston metropolitan area. The data set is specifically focused on image classification of homes according to the amount of damage the home received. All images of homes are labeled as C0, C2, or C4 respectively for low, medium or high damage.
Pytorch is a popular machine learning library for building deep learning models developed by Facebook. The basics of building a CNN model with Pytorch can be broken down into the following components:
Dataset Loaders and Transforms
Building the Neural Network
Training the Neural Network
Let’s get started by importing the modules we need for this notebook as well as set a few hyperparameters needed throughout the notebook. Then, we will dive into the basics of dataset loaders and transforms.
import torch
from torchvision import datasets, models, transforms
import torch.nn as nn
from datetime import datetime
import matplotlib.pyplot as plt
%matplotlib inline
torch.hub.set_dir('/tmp') # remove when not running here
This notebook will use the following hyperparameters:
Learning Rate (lr): how much model parameters are updated at each batch/epoch
Batch Size: number of data points used to estimate gradients at each iteration
Epochs: Number of times to iterate over our entire dataset in optimization process
These hyperparameters will be used throughout the notebook and are defined below.
hp = {"lr":1e-4, "batch_size":16, "epochs":5}
Dataset Loaders and Transforms#
Loading, transforming and preparing data for building deep learning can be messy and difficult to maintain. Pytorch provides tools to ease this effort and decouples it from the training portion of your machine learning pipeline. Below summarizes the three Pytorch tools we will highlight in this demo:
Dataset: stores data and their corresponding labels
Transforms: performs data manipulation to make data suitable for training
DataLoaders: iterable around the dataset for ease of access to samples from the dataset.
Let’s dive into each of these components and load our design safe dataset.
Downloading dataset#
We first need to get our data set
! cp -r /scratch1/07980/sli4/training/cnn_course/data/data.tar.gz /tmp/
! tar zxf /tmp/data.tar.gz -C /tmp
! ls /tmp/Dataset_2
! rm /tmp/data.tar.gz
Train Validation
Next, let’s define the path to out train and validation sets based on the structure of the downloaded data.
train_path, val_path,test_path = "/tmp/Dataset_2/Train/", "/tmp/Dataset_2/Validation/", None
Dataset and Transforms#
Next, we set up a function to load our data and subsequently perform needed transforms. This functions uses a few tools that exist within torchvision.
Dataset#
torchvision.datasets.ImageFolder is a generic data loader where images are structured as follows:
path_to_data/C0/**.png
path_to_data/C2/**.png
path_to_data/C4/**.png
Note the directories C0, C2, and C4 are the names of the three classes in our classifier and, in this case, refer to low, medium and high levels of damage. Another noteworthy feature of torchvision’s datasets is that images are not immediately loaded into memory. They are loaded one by one as needed.
Transforms#
torchvision.transforms.Compose applies a series of transformations to your data. In our function, we use Compose to perform a series of two transforms:
torchvision.transforms.Resizewhich resizes your image to the specified dimensiontorchvision.transofrms.ToTensorconverts you images from PIL or numpy arrrays to a torch tensor.
In the function below, we use ImageFolder to load our train, validation and testing data and perform the needed transformations as described above.
def load_datasets(train_path, val_path, test_path):
img_transform = transforms.Compose([transforms.Resize((244,244)),transforms.ToTensor()])
train_dataset = datasets.ImageFolder(train_path, transform=img_transform)
val_dataset = datasets.ImageFolder(val_path, transform=img_transform)
test_dataset = datasets.ImageFolder(test_path, transform=img_transform) if test_path is not None else None
print(f"Train set size: {len(train_dataset)}, Validation set size: {len(val_dataset)}")
return train_dataset, val_dataset, test_dataset
train_set, val_set, test_set = load_datasets(train_path, val_path, test_path)
Train set size: 1322, Validation set size: 363
Construct Dataloaders#
As mentioned above, Pytorch’s dataset features load images one by one. When training deep learning models, we typically use a batch gradient descent algorithm to optimize our network and thus we will need to load random images in our specified batch sizes at each gradient descent step. Pytorch’s DataLoader is an iterable that automatically performs and loads the data need at each iteration via a simple API. In the function, we instantiate the DataLoader for our train, test and validation datasets.
def construct_dataloaders(train_set, val_set, test_set, batch_size, shuffle=True):
train_dataloader = torch.utils.data.DataLoader(train_set, batch_size, shuffle)
val_dataloader = torch.utils.data.DataLoader(val_set, batch_size)
test_dataloader = torch.utils.data.DataLoader(test_set, batch_size) if test_path is not None else None
return train_dataloader, val_dataloader, test_dataloader
train_dataloader, val_dataloader, test_dataloader = construct_dataloaders(train_set, val_set, test_set, hp["batch_size"], True)
Visualizing the Design Safe Dataset#
Before we move on to building the architecture of our CNN model, let’s visualize some of our design safe dataset.
fig,axs = plt.subplots(3,3,figsize=(8, 8))
label_map={0: 'low damage', 1:'medium damage', 2:'high damage'}
for ax in axs.ravel():
sample_idx = torch.randint(len(train_set), size=(1,)).item()
img, label = train_set[sample_idx]
ax.imshow(img.permute(1, 2, 0)) #.reshape((244,244,3)))
ax.set_title(label_map[label])
fig.tight_layout()
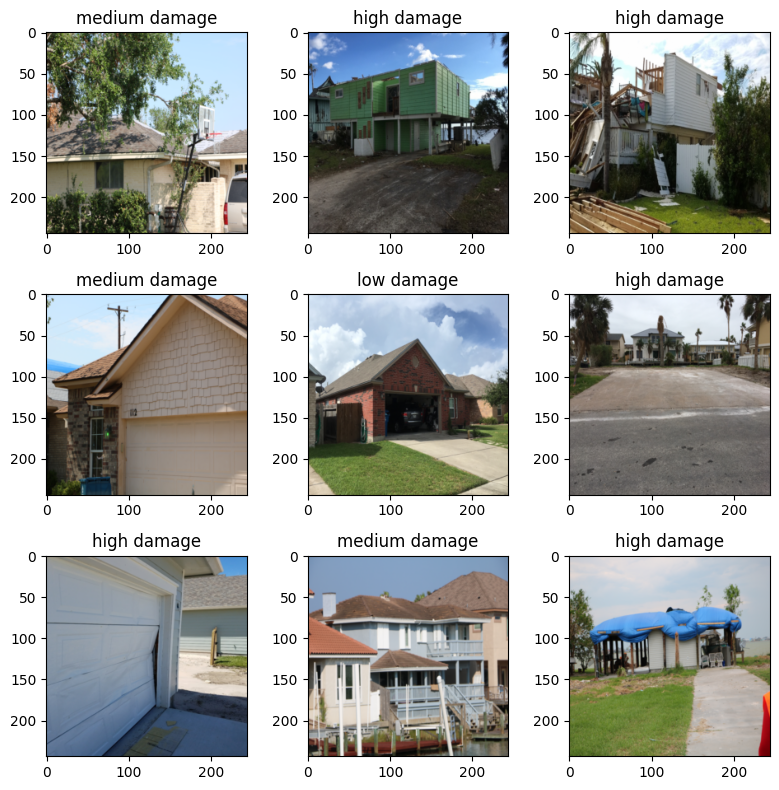
As we can see above, our dataset contains images of houses post Hurricane Harvey. Each of these images has been labeled as having low, medium, or high levels of damage.
Building the Neural Network#
Next, we need to build the architecture of our CNN classfier. In this tutorial, we will utilize transfer learning. It is rare for people to build CNN from scratch as we can leverage a CNN model that was trained with very large datasets and apply that knowledge to our use case as is done in transfer learning.
ResNet#
In this tutorial we will start with the resnet18 model trained with the ImageNet dataset. Below we instantiate this model and load the pretrained weights.
resnet = models.resnet18(weights="IMAGENET1K_V1")
Downloading: "https://download.pytorch.org/models/resnet18-f37072fd.pth" to /tmp/checkpoints/resnet18-f37072fd.pth
100%|██████████| 44.7M/44.7M [00:00<00:00, 103MB/s]
Transfer Learning#
With transfer learning there are two common ways we can utilize previously optimized weights for specific CNN architectures:
Start the optimization process of model at the previously optimized weight instead of random weights. This will accelerate the training process of the entire network.
Use the previously optimized weights as a fixed feature extractor. That is, we freeze the previously learned weights except that of the last fully connected layers.
In this tutorial, we will use ResNet18 as a fixed feature extractor. Let’s start by freezing all the weights in our network:
for param in resnet.parameters():
param.requires_grad = False
Note, if we wanted to fine tune our entire model, we could skip the above step.
Then, we can add a new final fully connected layer. These parameters will, by default in Pytorch, not be frozen when we replace the final fully connected layers and will be learned in the training process.
# print last fully connected layer
resnet.fc
Linear(in_features=512, out_features=1000, bias=True)
# get the input dimension for this layer
num_ftrs = resnet.fc.in_features
# build the new final fully connected layers of network
fc = nn.Sequential(
nn.Linear(num_ftrs, num_ftrs),
nn.ReLU(),
nn.Linear(num_ftrs, 3)
)
# replace final fully connected layer
resnet.fc = fc
Training the Neural Network#
Define Loss Function and Optimizer#
Now that we have our dataloaders set up and our model architecture built, we are ready to train our model. To train the model, we need to set up a loss function and an optimizer to optimize that loss function. Below we instantiate the Cross Entropy Loss function and the Adam optimizer.
opt = torch.optim.Adam(resnet.parameters(),lr=hp["lr"])
loss_fn = nn.CrossEntropyLoss()
Note that we are using the learning rate hyperparameter specified at the the top of this notebook.
hp
{'lr': 0.0001, 'batch_size': 16, 'epochs': 5}
Train and Model Evaluation Functions#
Finally, we need to define standard pytorch train and evaluation functions. The function train iterates over multiple epochs and all batches of data in each epoch. Model parameters are updated for each batch with the given loss function and optimizer. The model accuracy and loss is computing with testing data at every epoch.
@torch.no_grad()
def eval_model(data_loader, model, loss_fn, DEVICE):
model.eval()
loss, accuracy = 0.0, 0.0
n = len(data_loader)
for i, data in enumerate(data_loader):
x,y = data
x,y = x.to(DEVICE), y.to(DEVICE)
pred = model(x)
loss += loss_fn(pred, y)/len(x)
pred_label = torch.argmax(pred, axis = 1)
accuracy += torch.sum(pred_label == y)/len(x)
return loss/n, accuracy/n
def train(train_loader, val_loader, model, opt, loss_fn, epochs, DEVICE):
n = len(train_loader)
for epoch in range(epochs):
model.train(True)
count = 0
avg_loss, avg_acc = 0.0, 0.0
count = 0
print(f"Epoch {epoch+1}/{epochs}:")
start_time = datetime.now()
for x, y in train_loader:
x, y = x.to(DEVICE), y.to(DEVICE) # move data to gpu
pred = model(x) # compute model prediction
loss = loss_fn(pred,y) # compute model loss
# backpropogation
opt.zero_grad() # reset gradient calculations
loss.backward() # compute gradients
opt.step() # update model parameters via optimization step
avg_loss += loss
pred_label = torch.argmax(pred, axis=1)
avg_acc += torch.sum(pred_label == y)/len(x)
end_time = datetime.now()
print(f"Time: {(end_time-start_time).seconds}s")
print(f"Average train loss: {avg_loss/n}, Average train accuracy: {avg_acc/n}")
val_loss, val_acc = eval_model(val_loader, model, loss_fn, DEVICE)
print(f"Val loss: {val_loss}, Val accuracy: {val_acc}\n")
Check for GPU and move model to correct device#
Finally, we need to check if a gpu is available. If a gpu is available, we will pass our model and data to the gpu to accelerate the calculations needed to train this model.
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
device
device(type='cuda', index=0)
resnet.to(device); # pass resnet model to gpu
Train Model#
Tasks:
Monitor Val accuracy change along epochs
Monitor Val accuracy vs. train accuracy
train(train_dataloader, val_dataloader, resnet, opt, loss_fn, hp["epochs"], device)
Epoch 1/5:
Time: 227s
Average train loss: 0.970403254032135, Average train accuracy: 0.5445783138275146
Val loss: 0.05382955074310303, Val accuracy: 0.6563735604286194
Epoch 2/5:
Time: 222s
Average train loss: 0.7938651442527771, Average train accuracy: 0.6698794960975647
Val loss: 0.04907182604074478, Val accuracy: 0.6699604988098145
Epoch 3/5:
Time: 223s
Average train loss: 0.7483504414558411, Average train accuracy: 0.6772590279579163
Val loss: 0.04733126237988472, Val accuracy: 0.6699604988098145
Epoch 4/5:
Time: 225s
Average train loss: 0.7106617093086243, Average train accuracy: 0.6864457130432129
Val loss: 0.044527120888233185, Val accuracy: 0.7188735008239746
Epoch 5/5:
Time: 223s
Average train loss: 0.6822027564048767, Average train accuracy: 0.7106927633285522
Val loss: 0.04329155385494232, Val accuracy: 0.7119565606117249
OPTIONAL EXERCISE#
In the demo above we trained ResNet18 model with hyperparameters with learning rate 1e-4 for 5 epochs. Try to train the model with learning rate 1e-5 and 1e-3, and compare the training speed and performance. Which is the best learning rate: 1e-5, 1e-4 or 1e-3?
for lr in [1e-5, 1e-3]:
hp["lr"] = lr
opt = torch.optim.Adam(resnet.parameters(),lr=hp["lr"])
print(hp)
loss_fn = nn.CrossEntropyLoss()
resnet = models.resnet18(weights="IMAGENET1K_V1")
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(device)
resnet.to(device);
print(f"start training with learning rate {lr}")
train(train_dataloader, val_dataloader, resnet, opt, loss_fn, hp["epochs"], device)
{'lr': 1e-05, 'batch_size': 16, 'epochs': 5}
cuda:0
start training with learning rate 1e-05
Epoch 1/5:
Time: 226s
Average train loss: 8.806357383728027, Average train accuracy: 0.0007530120201408863
Val loss: 0.5797683596611023, Val accuracy: 0.0
Epoch 2/5:
Time: 222s
Average train loss: 8.817122459411621, Average train accuracy: 0.0007530120201408863
Val loss: 0.5735561847686768, Val accuracy: 0.0
Epoch 3/5:
Time: 224s
Average train loss: 8.80456256866455, Average train accuracy: 0.0007530120201408863
Val loss: 0.5777430534362793, Val accuracy: 0.0
Epoch 4/5:
Time: 217s
Average train loss: 8.827596664428711, Average train accuracy: 0.0007530120201408863
Val loss: 0.5745983123779297, Val accuracy: 0.0
Epoch 5/5:
Time: 218s
Average train loss: 8.808821678161621, Average train accuracy: 0.0
Val loss: 0.5743387341499329, Val accuracy: 0.0
{'lr': 0.001, 'batch_size': 16, 'epochs': 5}
cuda:0
start training with learning rate 0.001
Epoch 1/5:
Time: 225s
Average train loss: 8.814985275268555, Average train accuracy: 0.0007530120201408863
Val loss: 0.5782486796379089, Val accuracy: 0.0
Epoch 2/5:
Time: 224s
Average train loss: 8.809774398803711, Average train accuracy: 0.0
Val loss: 0.571698009967804, Val accuracy: 0.0
Epoch 3/5:
Time: 225s
Average train loss: 8.801504135131836, Average train accuracy: 0.0
Val loss: 0.5749053359031677, Val accuracy: 0.0
Epoch 4/5:
Time: 225s
Average train loss: 8.800519943237305, Average train accuracy: 0.0019578312058001757
Val loss: 0.5774373412132263, Val accuracy: 0.0
Epoch 5/5:
Time: 225s
Average train loss: 8.804729461669922, Average train accuracy: 0.0007530120201408863
Val loss: 0.5809144377708435, Val accuracy: 0.0
Conclusion#
In this notebook, we introduced the basics of how to build a CNN classification model using transfer learning as a fixed feature extractor. There were three major steps:
Loading and transforming our data
Building the architecture of our network
Training our model
In part 2 of this notebook, we will make several modifications to the workflow introduced in this notebook and see if we can improve the performance of our model.